2019-20 FYP PROJECTS
Open to all students from Mechatronics/Mechanical/Aerospace System streams. Students with a background in Mechatronics/Mechanical with experience in CAD/CAM, a strong appetite in computational programming and a sound knowledge in control systems would be ideal.
Project-1: “Robotic Scrub Nurse”: Baxter-based pick and place of surgical instruments
(2 students team: control/mechatronics background, ROS based coding/scripting ability desirable. 12 credit points)
Efficient communication and cooperation between surgical and support staff is of vital importance within the operating room (OR). Communication between the surgeon and scrub nurse is particularly important, with the surgeon relying on the nurse to provide the correct instruments when requested.
The use of robotic technology to assist staff within the OR is of particular interest, potentially improving efficiency, reducing costs and minimizing potentially dangerous misunderstandings. In order to achieve this suitable interaction and control methods must be defined and evaluated.
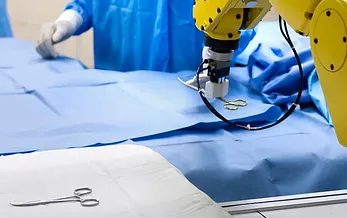
Baxter Robot
The principles of a robotic scrub nurse have been demonstrated utilizing gesture control (http://www.purdue.edu/newsroom/research/2011/110203WachsGestures.html)
Subsequently this project aims for the development of a “robotic scrub nurse”, or surgical assistant, which is capable of understanding simple voice commands (surgical instrument names) and responding by locating, grasping and handing over the appropriate instrument. This project involves the implementation of such a system utilizing the Baxter robotic platform.
This project will include:
- Implementation of a vision based approach for detection of surgical tools.
- Computation of kinematics and online path planning.
- Implementation of control scheme.
- Implementation of voice based commands.
Suitable students should have a good knowledge of robotic control techniques, as well as an interest in computer vision, voice recognition and robotic control, as well as some skill in coding/scripting.
Project-2: Development of a surgical simulation platform for medical training:
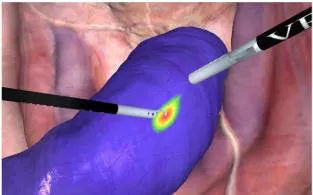
2a: Surgical simulation using physics engine for medical training
(1 student from Mechanical/Mechatronics Eng. background – 6 credit points)
Virtual surgical training simulation can provide a safe and efficient learning environment for medical students and novice surgeons. The BMRAS lab is developing a surgical training system for training of laparoscopic surgical skills using physics engine for medical training and education.

[1] A. Maciel, T. Halic, Z. Lu, L. P. Nedel, and S. De, “Using the PhysX engine for physics‐based virtual surgery with force feedback,” The International Journal of Medical Robotics and Computer Assisted Surgery, vol. 5, no. 3, pp. 341-353, 2009.
[2] Y. Sui, J. J. Pan, H. Qin, H. Liu, and Y. Lu, “Real-time simulation of soft tissue deformation and electrocautery procedures in laparoscopic rectal cancer radical surgery,” Int J Med Robot, vol. 13, no. 4, pp. e1827, Dec, 2017.
Left [1]; right [2]
Scope: The project will involve visulization, deformation, and haptic interaction with virtual human models.
The task is to develop of a laparoscopic surgical simulator using physics engine.
Prerequisites: This will require sound knowledge and skills in: OpenGL; C++; Open-source APIs
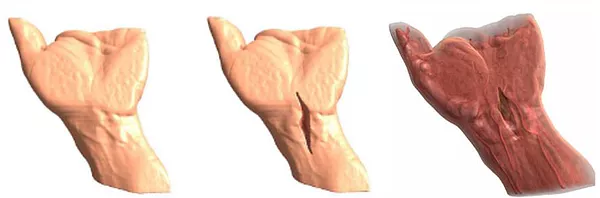
2b: Development of a real-time, realistic, and stable soft tissue deformable model using GPU acceleration for surgical simulation
(1 student from Mechanical/Mechatronics Eng. background – 6 credit points)
Surgical simulation requires real-time and realistic modelling of soft tissue deformation under tool-tissue interactions. The BMRAS lab is developing a GPU-based implicit dynamics mass-spring model for real-time, realistic, and stable surgical simulation for medical training and education. The project will involve GPU programming, soft tissue deformation, and implicit dynamics.
Scope: The task is to develop a GPU-based implicit dynamics mass-spring algorithm for soft tissue deformation.
Prerequisites: This will require sound knowledge and skills in: GPU programming; C++; Open-source APIs
[1] H. Courtecuisse, H. Jung, J. Allard, C. Duriez, D. Y. Lee, and S. Cotin, “GPU-based real-time soft tissue deformation with cutting and haptic feedback,” Prog Biophys Mol Biol, vol. 103, no. 2-3, pp. 159-68, Dec, 2010.
2c: FEA investigation of soft tissue thermomechanical behaviour in thermo-therapeutic applications (position filled)
(1 student from Mechanical/Mechatronics Eng. background – 6 credit points)
Understanding the thermomechanical behaviour of soft tissues can provide important information to surgeons in conducting thermal therapies. The BMRAS lab is investigating the soft tissue thermomechanical behaviour using commercial finite element analysis packages. The project will involve thermomechanical modelling of soft tissues, temperature, stress, and strain evaluation, and temperature-dependent thermomechanical properties.
Scope: The task is to conduct a FEA of thermomechanical behaviour of soft tissues.
Prerequisites:This will require sound knowledge and skills in: Finite element analysis; Solid mechanics; Heat transfer
[1] Y. Sui, J. J. Pan, H. Qin, H. Liu, and Y. Lu, “Real-time simulation of soft tissue deformation and electrocautery procedures in laparoscopic rectal cancer radical surgery,” Int J Med Robot, vol. 13, no. 4, pp. e1827, Dec, 2017.
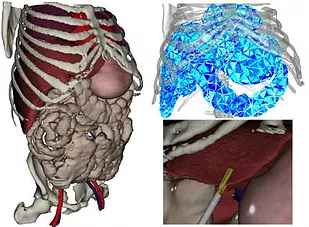
2d: Development of a biological phantom for liver (position filled)
(1 student from Mechanical/Mechatronics Eng. background – 6 credit points)
In order to allow the consistent and safe HIFU treatment of liver tumours a robotic system has been developed at BMRAS. Prior to the clinical integration and evaluation of the system, extensive pre-clinical testing must be performed, the initial stages of which will involve the utilization of anatomical phantoms. While the liver is a complex organ, the development of a suitable anatomical phantom will allow the troubleshooting and optimization of the robotic system in preparation for eventual clinical use.
.webp)
Thus, the aim of this project is the development of a reusable liver phantom, or the definition of a straightforward process for the creation of single use phantoms, which can be utilized in the evaluation of a surgical robot for non-invasive treatment of liver tumours. We have developed a few such phantoms in our lab. The developed phantom should have similar mechanical properties to the liver (i.e. be flexible) as well as allowing mock tumour tissue to be embedded within.
The project scope will include:
– CAD design of appropriate phantom and Evaluation of various phantom materials
– Definition and evaluation of manufacturing process and Involvement in pre-clinical evaluation of prototype robotic system
Prerequisites: The project involves soft printing and/or casting/molding; Students with good CAD and fabrication skills.
Project-3: Development of an interactive algorithm for deformation of large medical volumes
(1 student from Mechanical/Mechatronics Eng. background – 12 credit points)
Conducting deformation directly on the patient-specific source volumes is considered of great value but signifiantly difficult due to millions of voxels in the source medical data. The BMRAS lab is developing an interative approach that can deform large medical volumes in real-time. The project will involve medical volumes and soft tissue deformation.
[1] A. Rodriguez, A. Leon, and G. Arroyo, “Parallel deformation of heterogeneous ChainMail models: Application to interactive deformation of large medical volumes,” Comput Biol Med, vol. 79, pp. 222-232, Dec 1, 2016.
Scope: The task is to develop an interactive algorithm to deform large medical volumes in real-time.
Prerequisites: This will require sound knowledge and skills in: C++; Matlab; Solid Mechanics
Project-4: Single Incision Minimally invasive surgery
(3-4 students from Mechanical/Mechatronics Eng. background – 12 credit points)
The aim of this project is the optimization and continued development of a robotic platform for minimally invasive surgery.
Minimally invasive surgery (MIS) has various advantages over open surgery such as: short operating time, faster recovery, less scarring, less pain, short hospital stays etc. The primary tools used in MIS are: surgical scopes, trocars, canulae, manipulating tools fitted for grasping, cutting, suturing, stapling, cautery etc.
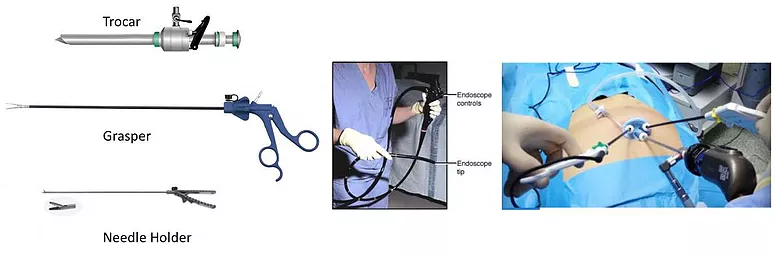
Ref: (Left) Typical Instruments used on the laparoscopic surgery; (Middle) An endoscope (imaging methodology in laparoscopic surgery); (Right) An illustration of a typical laparoscopic surgical setup
Two FYP projects were initiated in 2016-17 and a couple of initial prototypes were designed and tested: 1- as concentric tubular structure controlled by servo motors and 2-wire jamming soft-robotic mechanism for suturing. The prospective FYP students are required to enhance the design for more flexibility and dexterity as well as controlled actuation of multiple degrees-of-freedom mechanism. It will be co-supervised by clinical experts from Monash Health:
Student 1: Scope - Design enhancements of the dedicated tools and actuators + functional testing (position filled)
Student 2: Scope - Design enhancements of the continuum/concentric robot + functional testing
Student 3: Scope - Automated control of multiple degrees-of-freedom with sensor integration + functional testing
Prerequisites: 3 students desired: two with good CAD and fabrication skills (preferably Mechanical or Mechatronics discipline) and one for automated control (preferably Mechatronics/Aerospace or ECSE discipline)
Project 5: Modelling motion of soft robotic actuators
(2 students from Mechanical/Mechatronics Eng. background – 12 credit points)
Soft actuators are increasingly becoming popular in the robotics domain due to many desirables features over rigid systems. Most soft actuators have been able to overcome challenges faced by conventional rigid robotic systems such as lightweight and multi-dimensional motion capabilities with minimum motorised movements. Due to the aforementioned benefits, soft actuators are also being adapted in medical industry for both diagnostic and treatment related functions. However, due to high flexibility and unconventional joint configuration, modelling motion of soft actuators is still a challenge in the field.
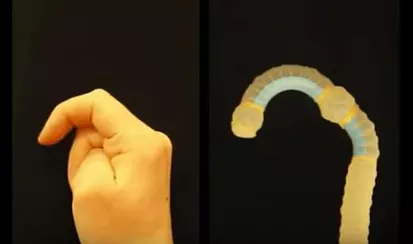
Ref: Soft Finger developed in by Harvard School of Engineering and Wyss Institute (https://www.seas.harvard.edu/news/2016/12/mimicking-biological-movements-with-soft-robots)
In 2017-18, several single and multi-directional soft actuator models were developed at our group using pneumatic actuation and stiffness retaining mechanisms. Furthermore, both simulated and analytical models were also developed for some variations of single directional actuators. The prospective FYP students will be provided this prior information as motivation. In 2019, two students will work on two separate soft actuator design ideas of their own to align with the overall project scope below.
Scope (for each student):
1. Develop a dynamic model of a soft actuator which can perform a particular medical application (e.g. endoscopy, suturing) and simulate the motion of the proposed model using a suitable software (e.g. Solidworks, Ansys, Abaqus, suitable Matlab toolbox )
2. Fabricate a prototype soft actuator, demonstrate and validate dynamics identified in the simulated model
Prerequisites: Each student undertaking this project is expected to have basic understanding of Computer Fluid Dynamics (CFD), pneumatic systems, CAD modelling, some understanding of 3D printing and some working experience with microcontroller programming (e.g. Arduino, Raspberry Pi or similar)
Project 6: Object tracking soft-robot (2 student team) – 12 CP
(2 students from Mechanical/Mechatronics Eng. background – 12 credit points)
This innovative project is aimed at developing a soft-body robot which can track a specified target. The students are expected to identify, model and develop the required dynamics of the robot so that it includes adequate degrees of freedom (DoF) to perform the designated tracking functions. The project is flexible and the students can select a target of their choice, although accuracy of the developed system to should be measured and validated.
Scope:
Student 1: Model, design and fabrication of a suitable soft actuator to which has sufficient DoF to perform object tracking functions
Student 2: Implement proper sensing methods and control system for actuator movement and the tracking system (position filled)
Prerequisites: One student with good understanding and skills in dynamics, CAD modelling and fabrication skills, one student with sound knowledge in control systems, programming and object tracking methodologies.

Ref: Stanford soft actuator (https://news.stanford.edu/2017/07/19/stanford-researchers-develop-new-type-soft-growing-robot/)
Project-7: Custom Robotic Orthosis (Exoskeleton) for Rehabilitation
(2 students from Mechanical/Mechatronics Eng. background – 12 credit points)
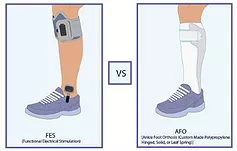
Robotic orthosis and casting/splinting for the limbs; an example is given here for post-stroke foot-drop condition. Foot drop gait is a kind of gait in which the dropping of the forefoot happens due to the weakness of the ankle and foot dorsiflexors. The most frequent causes of this type of disability include, for example, injuries caused by accidents, stroke, lateral sclerosis as a complication after hip joint replacement, and peripheral nerve damage. People with foot drop due to stroke usually are provided with an ankle-foot orthosis, a posterior splint that keeps the ankle in a neutral position during the swing phase of gait. The use of functional electrical stimulation of the peroneal nerve is an alternative treatment option. Also, motorized exoskeletons are being investigated for assisting dorsiflexion gait. Your aim is to design and test an innovative cost-effective solution that allows customized adjustments based upon the patient’s anatomy to assist and rehabilitate.
Scope:
- Perform a thorough literature review and critical assessment of the current state of the art in roles of exoskeletons in rehabilitative treatment;
- Design and build a low power, actuated exo/orthosis;
- Integrate a non-invasive detection/analytical methodology for feedback; observing healing effectiveness;
- Perform a thorough evaluation of your design with respect to applied stress and strain.
Functional electrical stimulation and ankle foot orthoses provide equivalent therapeutic effects on foot drop: a meta-analysis providing direction for future research, J Rehabil Med 2018; 50: 129–139.
For further information contact: