THE HISIC PRINCIPLE FOR MEDICAL ROBOT SAFETY
Medical robots are playing an increasingly important role in the recent advancements in healthcare systems. Many factors can cause safety problems in medical robots. Human error is one such aspect, for instance erroneous instructions during manipulation. System error is another important aspect, which can be subdivided into four categories, viz. hardware based errors, software errors, hardware triggered by software, and software triggered by hardware. Any robotic system should have basic safety requirements clearly listed during design specifications stage. Firstly, hardware should be proved safe when it stands alone or, when no software controls it. Secondly, the software must run and test correctly during simulation or when no hardware is involved. We put forward a HISIC (Hazard Identification and Safety Insurance Control) model to study the safety issues.
Overall we define the Safety Index, SF as,
SF = f(SW(PL),HW(PL))
where SW is the software factor, HW the hardware factor and PL the policy factor. PL is not a material factor, but it propagates through all phases of the medical robot. We believe that policies play a key role in safety controls because they regularize the whole lifecycle including research, design, production, test, and end use. We define the HISIC principles to identify and control safety factors from physical, medical and chemical aspects.
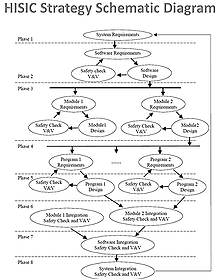
HISIC includes seven core principles for systematically analyzing and controlling safety issues. Ideally, every medical robot project should have a HISIC Team that is responsible for developing, implementing and maintaining the HISIC system. The team should include designers, surgeons, physicians, patients and administration staff.
1.Definitions and Requirements
2.Hazard Identification (HI)
3.Safety Insurance Control (SIC)
4.Safety Critical Limits (SCL)
5.Monitoring and Control (MC)
6.Verification and Validation (VV)
7.System Log and Documentation
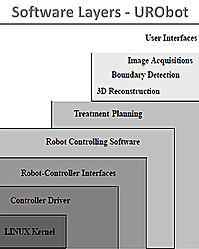
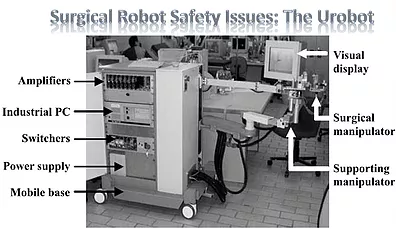
The HISIC principles are important for safety enhancement of medical robots. The implementation of these principles in a representative medical robotic system, the UroBot is exemplified in the following publication.
Baowei Fei, Wan Sing Ng, Sunita Chauhan, Chee Keong Kwoh, The safety Issues of Medical Robotics, Reliability Engineering and System Safety, 2001, USA, Vol.73, pp183-192.
Current/Available Projects:
-
Parametric analysis and fail safe mechanisms for medical robotic safety;
-
Bio compatibility and implantable devices’ safety;
-
Safety driven design for medical robots;
-
Quantification and optimization of device based human-errors in emergency medicine;
-
Investigation into quantification of cognitive-load on clinicians' performance during high-tech medical interventions (in collaboration with psychology dept.);
Our relevant publications:
-
Swandito, G.G. N. Kumar, S. Chauhan, Control Hierarchy Of Medical Robotic Systems For Non-Invasive Surgery, Proceedings of the 12th International Conference on Biomedical Engineering, ICBME 05, 7-10 Dec.05, Singapore.
-
Sunita Chauhan, Ranjan Kumar Mishra, Conceptualization & Implementation of Safety Aspects in Surgical Robotic System, Proceedings of the 6th World Multiconference on Systemics, Cybernetics and Informatics (SCI 2002), Orlando, USA, in July 14-18, 2002.
-
Ranjan Kumar Mishra, Sunita Chauhan, Safety of Surgical Robotic System- A Fundamental Aspect, Proceedings of the 12th International Symposium on Measurement and Control in Robotics (ISMCR-02) Towards Advanced Robot Systems and Virtual Reality, June 20-21, 2002 – Bourges, France.
-
Baowei Fei, Wan Sing Ng, Sunita Chauhan, Chee Keong Kwoh, The safety Issues of Medical Robotics, Reliability Engineering and System Safety, Vol.73, pp183-192, 2001.
-
Fei Baowei, Chauhan S, Ng WS, Kwoh CK, The hazard identification and safety insurance control (HISIX) for medical robot. Presented & published in Proceeding of Chicago 2000 World Congress on Medical Physics and Biomedical, Chicago, Illinois, 23-28 July'2000.