ROBOTIC SYSTEMS FOR FOCAL ULTRASOUND SURGERY THE FUSBOT SERIES
Robotic Systems called FUSBOTS : As mentioned earlier, we devised a series of robotic systems called FUSBOTs (Focused Ultrasound Surgery Robots) in our laboratory for facilitating automated image-guided focal ultrasound procedures to treat cancers/tumours in various parts of the human body. The operation of the ablative system requires appropriate positioning of HIFU transducer(s) in a pre-arranged spatial configuration. Single as well as multiple probe approaches are used for deploying HIFU energy in the specified targets. The lesion created by a single exposure in HIFU based ablation is often smaller than the desired target region. The confocal region of the probes is thus required to be mechanically scanned over the region of interest. For FUSBOTs, the robotic manipulator design, and thus kinematics and dynamics of mechanical configuration, are based on specific application. The common features include: image guidance using diagnostic ultrasound, surgical feedback and interactive & supervisory control by the surgeon. Once the surgical protocol is decided in the pre-planning phase, the robots accurately position the HIFU transducer(s) at specified locations such that the focus (or, the confocal region in case of multiple probes) is coincident with the planned lesion position on a given 2D image.
FUSBOT : The Breast Surgery Robotic FUS System
The robotic system, FUSBOT was developed in order to mechanically scan and ablate a specified target in human breast. The lastest version of custom designed robotic system for this application has 5-DOFs (3 for positioning, 1 orientation of end-effector and 1 for imaging) in order to guide an end-effector through a pre-determined and image-guided trajectory. The end-effector comprises a purpose built jig for mounting the HIFU transducer(s) and it operates in a degassed water tank. HIFU probes are positioned such that the focal zone (of single probe) or, joint focus (in multiple probes) overlaps within the affected target area. Fragmentation of energy into multiple low energy beams help in minimizing hot spots in overlying structures.
For a target tumor area larger in size than the focal zone of the beam, the HIFU probe(s) need to sweep the entire volume of the lesion in 3D. The probe manipulation modules and robotic work-envelope encompass the human torso region and thus are capable in reaching and treating cancers/tumors other than the breast, such as through acoustic windows in trans-abdominal and supra-pubic routes. The specific area of interest can be reached by using a sliding window opening at the top of the water-tank. Various experimental trials in tissue (in-vitro and ex-vivo) using the system validate its excellent precision and repeatability.
FUSBOT : The Urological Surgery Robotic FUS System
The changeable end-effectors in FUSBOT system (as described in the previous section) can allow surgery through trans-abdominal route to reach urological organs. The purpose of contriving the FUSBOT system (superscript US=> Urological Surgery), however, was to enhance the flexibility to deliver multi-probe, multi-route access to remote and disparate organs for two main reasons: 1. to produce adequate dosage in the selective overlapping focal zone while keeping low dosage exposure in individual beam paths 2. to gain better access to areas, which may not be reached by any one route alone due either to deterioration of beam convergence along a long path or, due to inhibited (bone/air) access window.
A modular approach is adopted for safety reasons. The main components of the system include: Probe manipulation modules each of which are equipped with 3-degrees of freedom; a base harness registered to the operating table, Graphical User Interface and image control. HIFU dosage delivery is controlled separately so as to avoid any interference with the manipulation system.
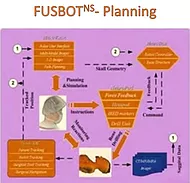
FUSBOT : The Neuro-Surgery Robotic FUS System
The present version of neuro-surgical system is developed for both single and multi-probe in-situ approach for surgery of deep-seated targets of the brain through a precise craniotomy. The desired craniotomy is performed using Neurobot system with an integrated precision Hexapod system (a Skull base drilling system developed at MAE under our previous project). The accuracy of this system is within ± 0.1 mm. An optical tracking system, OPTOTRAK®, tracks the displacements of infrared markers placed both on the hexapod mobile platform and on the patient. A detailed atlas of the brain can be developed using pre-operative MRI scans to help the neurosurgeons in precisely calculating 3D volume of the region of interest during pre-planning phase. In the ablative approach using HIFU, the target site is registered to an extended endeffector, called HIFU-effector, at the Neurobot system through an appropriate couplant bellow to the dura mater with a provision for attaching changeable end-effectors for a surgical drill unit (as used for creating craniotomy). This module is rigidly coupled on the Hexapod and is actuated with the 7th DOF of the robot, thus maintaining the original accuracy and registration.
Current/Available Projects:
-
Non-invasive diagnose and therapy using intelligent robotic techniques;
-
Real-time surgical planning and targeting for robotic surgery;
-
FUSBOT (Breast Surgery Robotic FUS System);
-
FUSBOT (Trans-Abdominal route Surgery Robotic FUS System) : Liver & bile duct, kidneys, pancreas, prostate etc;
-
FUSBOT (Urological Surgery Robotic FUS system);
-
FUSBOT (The Neuro-Surgery FUS System);
Our relevant publications:
-
Vineet K Kuruvilla and Sunita Chauhan, Real Time Estimation of Brain Tissue Dislocation and Deformation: A Phantom Study, Journal of Medical Imaging and Health Informatics, Volume 3, Number 2, June 2013 , pp. 195-205.
-
Sunita Chauhan and Abhilash RH, Empirical modelling of renal motion for compensation during robotic FIS, Proceedings of Computer Assisted Radiology and Surgery, CARS June 23 - 26, 2010, Geneva, Switzerland (Joint Congress of CAR / ISCAS / CMI / CAD / EuroPACS / CURAC).
-
Sunita Chauhan, A Non-invasive Robotic System for Urological Applications, Proceedings of the Computer Assisted Radiology and Surgery, CARS June 23 - 27, 2009, Berlin, Germany (Joint Congress of CAR / ISCAS / CMI / CAD / EuroPACS / CURAC).
-
Sunita Chauhan, FUSBOTs: Image-guided Robotic Systems for FUS (Focused Ultrasound Surgery) Proceedings of the International Symposium of Ultrasound Industry Association, UIA-07, March 2007, Teddington, UK.
-
Sunita Chauhan, FUSBOT-US: Empirical studies using a surgical robotic system for ulrological applications, Proceedings of the Intl’ Symposium on Therapeutic Ultrasound, ISTU 06, 31st Aug – 2nd Sept. 06, Oxford, UK.
-
Sunita Chauhan, R Mishra, J Li, A Minimally-invasive BioMechatronic Approach for Breast Cancer Surgery, Computer Assisted Radiology and Surgery, Proceedings of the CARS 22-25 June’05, Berlin, Germany (Joint Congress of CAR / ISCAS / CMI / CAD / EuroPACS / CURAC).
-
S. Chauhan, FUSBOT - An Ultrasound Guided Robot for Focal Ultrasound Surgery, Proceedings of the Intl’ Symposium on Therapeutic Ultrasound, ISTU 04, Kyoto, Japan, Sept. 18-20,2004.
-
S. Chauhan, A HIFU Medical Robotic System for Organotripsy and Tissue Ablation – The FUSBOT, Proceedings of the Intl’ Conference on Computing, Communications and Control Technologies (CCCT 2004), Austin (Texas), USA, August 14-17, 2004.
-
S. Chauhan, J.R Li, R.Mishra, W.K Lim, A Hacker, M S Michel, P Alken, K U Köhrmann, Experiences Using A Special Purpose Robot for Focal Ultrasound based Tissue Ablation, Proceedings of the Intl’ Symposium on Therapeutic Ultrasound, ISTU 04, Kyoto, Japan, Sept. 18-20,2004.
-
Sunita Chauhan, Ming Yeong Teo and Wendy Teo, Robotic System for Ablation of Deep-seated Skull Base Cancers - A Feasibility Study, Proceedings of the 34th International MATADOR Conference, Manchester, UK, 7 to 9 July 2004.
-
Sunita Chauhan, Ranjan Mishra and Jing Rong Li, A Robotic System for Non-invasive Treatment of Urological Organs Accessible through Abdominal Window, Proceedings of the 34th International MATADOR Conference, Manchester, UK, 7 to 9 July 2004.
-
S.Chauhan, JR Li, R. Mishra, A HIFU Surgical Robotic System for Ulrological Applications, Proceedings of the International Symposium on Therapeutic Ultrasound, ISTU 03, 22-25 Jun-2003, Lyon, France.
-
S.Chauhan, R.Mishra, S.Kumar, M.Y.Teo, A Robot for Non-invasive Breast Cancer Surgery, Proceedings of the ICARCV’02, 4-7 Dec.02, Singapore.
-
Davies, B.L., Chauhan, S., Lowe, M.J., A Robotic Approach to HIFU Based Neurosurgery, Computer Science, No. 1496, UK, October, 1998, pp386-396.
-
B L Davies, Sunita Chauhan, Mike J Lowe, A Robotic Approach to HIFU Based Neurosurgery. Presented & published in Proceeding of MICCAI98: 1st International Conference on Medical and Computer-Assisted Intervention, Massachusetts Institute of Technology, USA. Oct 11-13, 1998.
-
Sunita Chauhan, B L Davies, M J S Lowe, A Robotic High Intensity Focused Ultrasound (HIFU) Multiple Probe System for Neuro-surgery. Proceedings of the IACAS: 1st CAS Intl’ Symposium in association with IIT, Chennai, India. May 7-9, 1998.
BS
US
NS
BS
US
NS
TAS
BS
BS
US