Object Localisation
Foraging behaviour of E. coli
E. coli bacteria are capable of optimising their location in a nutrient gradient using two simple behaviour states, tumble and run. During a tumble phase, the bacterium rotates on the spot and orients itself in a new random direction. During a run phase, the bacterium moves in a relatively straight line, modulating the length of the run according to the improvement or deterioration in nutrient strength. Repeating these two behaviours continuosly results in the bacteria converging on a relatively favourable point in the gradient space.
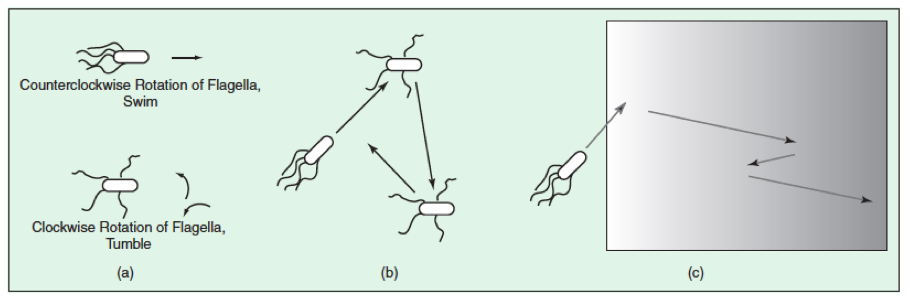 |
| Foraging behaviour of E. coli bacteria[1] |
Audio-based object localisation
In order to create an artificial gradient for our robot to climb, the e-puck's charging platform was equipped with a speaker that emitted pink noise relatively evenly in all directions. The e-puck itself is equipped with three microphones that were averaged (for minimising rotational bias) to take a measurement of the gradient space periodically.
An algorithm modelled on the behaviour of E. coli was developed that enabled our modified e-puck to navigate to its charging platform in a similar way to how E. coli navigate toward better nutrient sources. The video below shows the e-puck robot repeatedly navigating toward the charging platform (center), detecting that it has made contact with the beacon using volume and proximity thresholds.
The object localisation approach proved effective within the limitations of the e-puck's audio sensory capabilities (~3m). To enable the robot to operate beyond this threshold, a collective navigation strategy was proposed for swarms of e-puck robots, based on the naturally occurring DLA process. 